고정 헤더 영역
상세 컨텐츠
본문
728x90
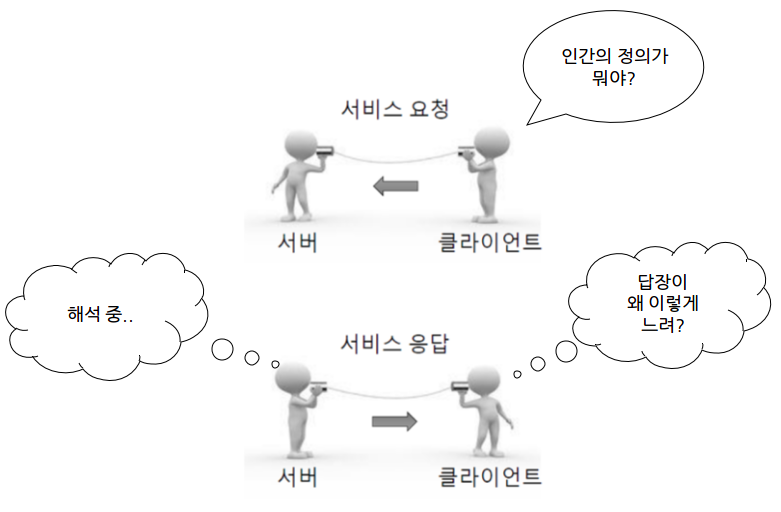
Service
요청 / 응답은 한 쌍의 메시지로 정의되는 서비스 를 통해 수행됩니다 . 하나는 요청 용이고 다른 하나는 응답 용입니다. 제공하는 ROS 노드 는 문자열 이름 으로 서비스를 제공 하고 클라이언트는 요청 메시지를 보내고 응답을 기다림으로써 서비스를 호출합니다. 클라이언트 라이브러리는 일반적으로이 상호 작용을 마치 원격 프로 시저 호출 인 것처럼 프로그래머에게 제공합니다.
- 양방향 소통이며 한 쌍으로 구성되어 있다.
Server(응답) < -- > Client(요청)

- 클라이언트는 요청을 보내고 응답을받을 때까지 차단합니다. 그러므로 계산과 빠른 작업에만 사용해야합니다
'coding > ROS' 카테고리의 다른 글
| [ROS] ROS 용어 정리 (0) | 2021.06.07 |
|---|---|
| [ROS] Action, Action server, Action client (0) | 2021.06.07 |
| [ROS] Topic, Publisher, Subscriber (0) | 2021.06.07 |
| [ROS]우분투 리눅스 ROS (0) | 2021.06.07 |
| ROS 모델설계 2 (0) | 2021.06.04 |




